
The mBed versions of the AVC PCBs arrived. I built the first version, with surface mount components in my oven at home. It works first time. It turns out I made one mistake on the PCB, using the wrong ratio SMD resistors with the battery divider in to the mBed, so I had to take them off and modify it with standard through hole resistors, as I couldn’t hand solder the 0602 surface mount resistors. I made the modification for the SPI connection for the IMU, and swapped a couple of sensor to different pins to give me SPI and Serial in the right places.
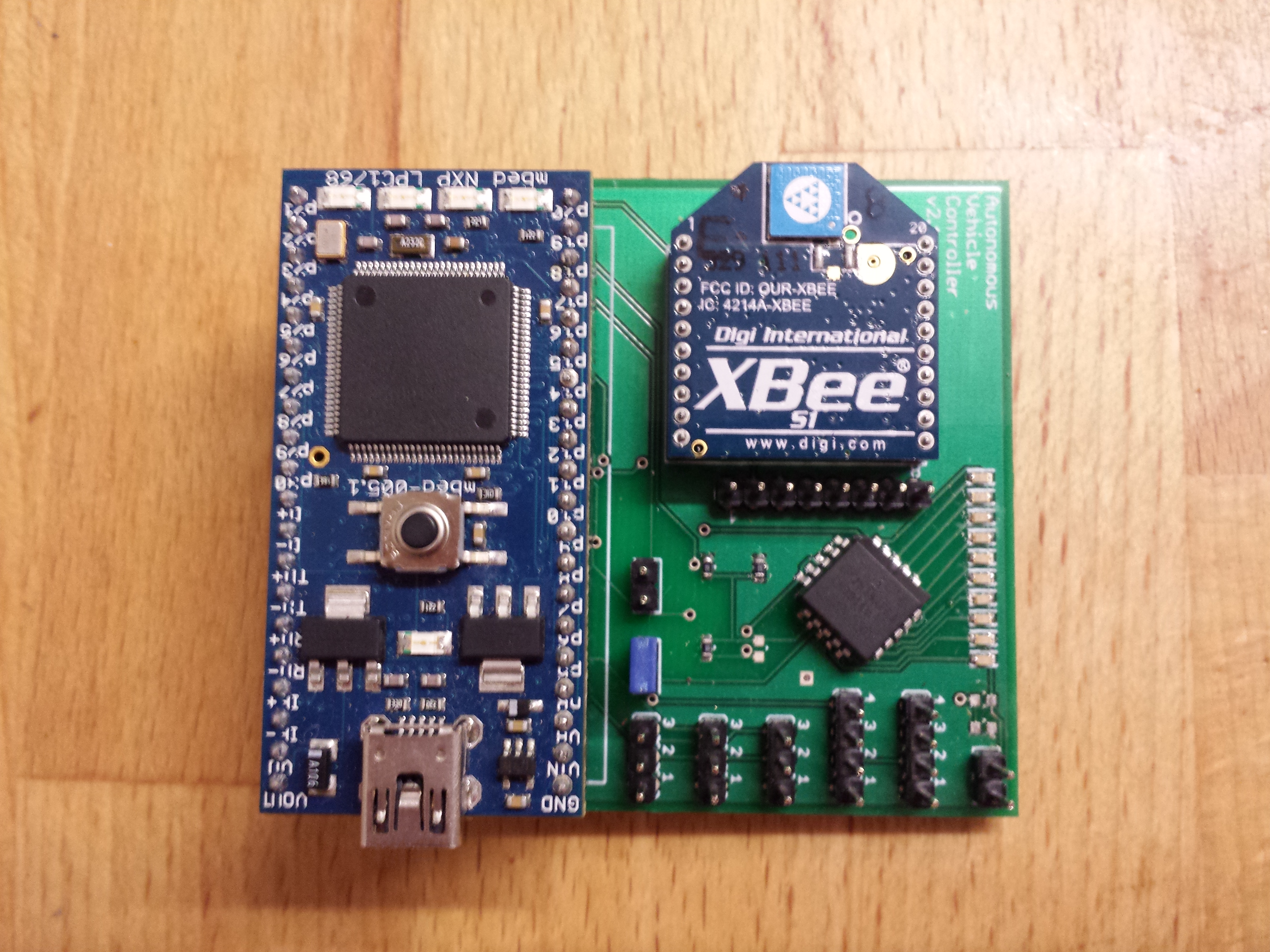
AVC 2013 mBed Custom PCB
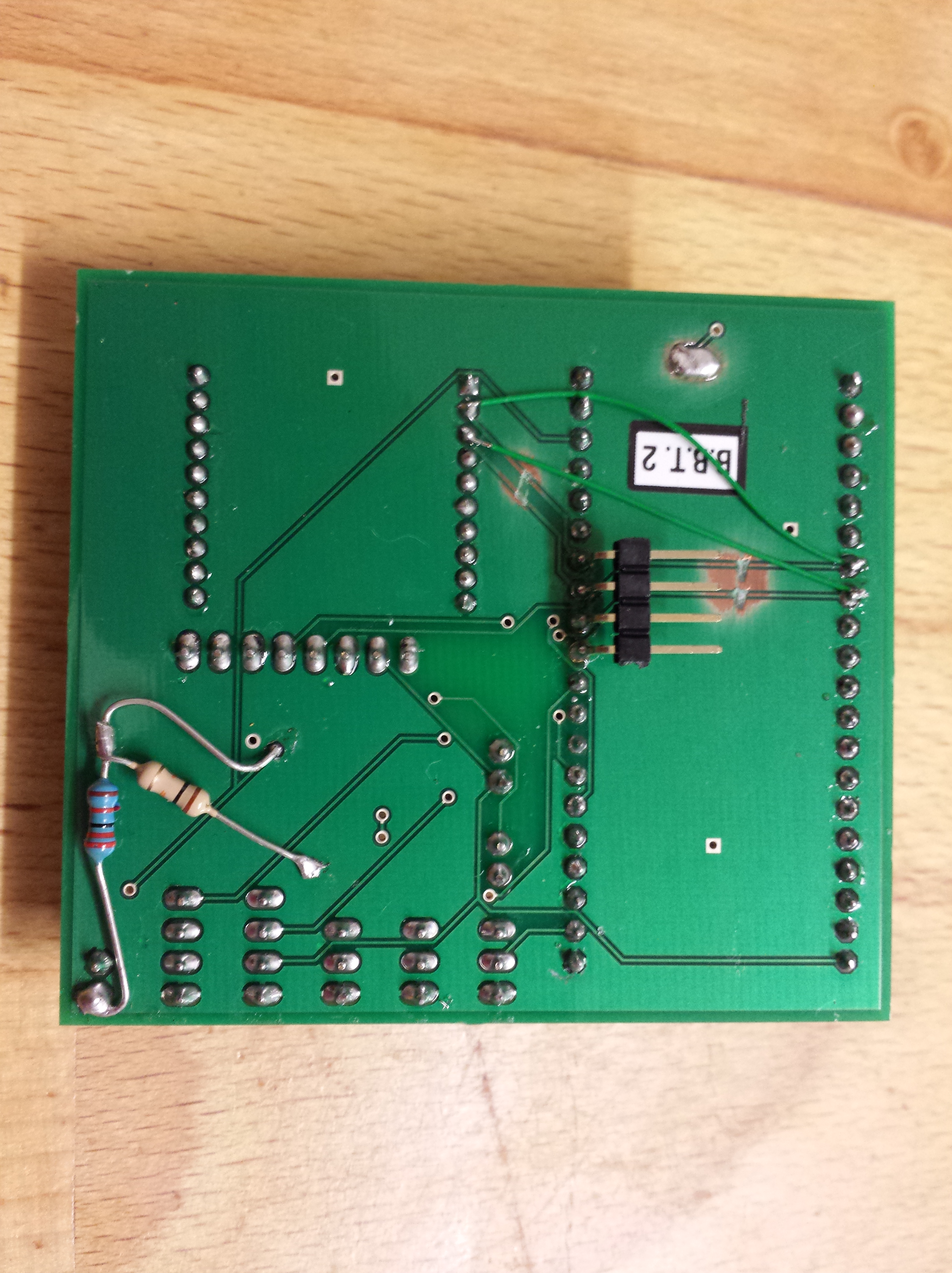
AVC 2013 mBed Custom PCB
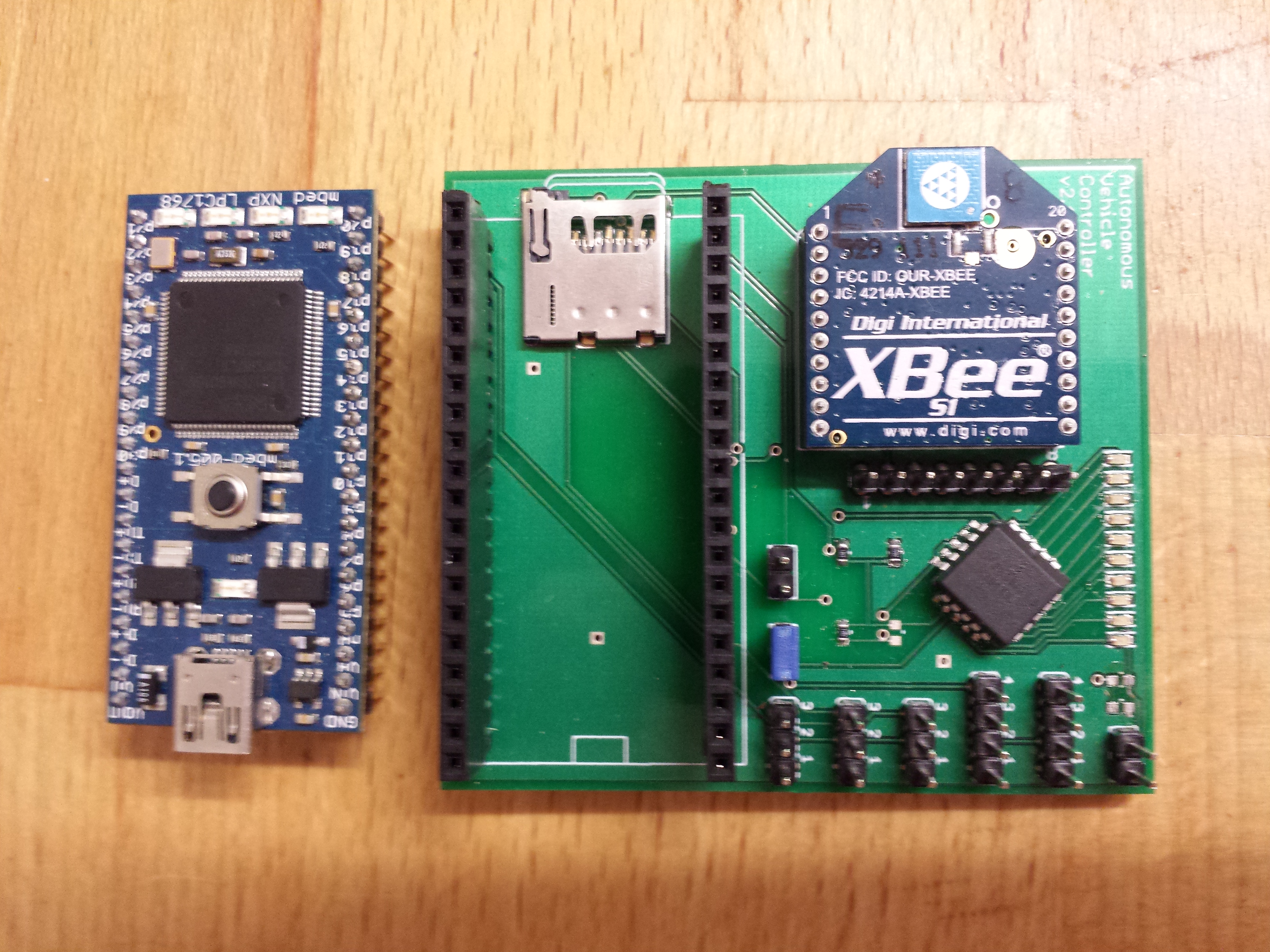
AVC 2013 mBed Custom PCB
I mounted the circuit in a Tupperware box on the car to keep it water tight.
My first outside test of the complete system was very exciting, but a little disappointing. Not only did I manage to run my wife over with the car, giving her a nasty bruise, but also the car seemed to like to take the scenic route to the way point, rather than a more direct route. All down to magnetometer issues again. I was still getting erroneous and unstable readings. In fact this plagued me from start to finish on this project, and still hasn’t gone away.
The only solution I have found to improving the magnetometer readings is to re-run the magnetometer re-calibration process regularly (before each run). The numbers always come out slightly different?
The first end to end test of the system in my garden was one week before the competition. I still hadn’t written a lot of the other functions in the code. Sections of the code like; how to tell if I had reached a waypoint, loading way points from SD, obstacle avoidance using the sonar, and tuning the PID parameters. I also hadn’t actually mapped my waypoints for the route I was going to take through the course.
The PID tuning would have to wait. I was getting pretty good steering results just with the “P” terms. This would mean I was in danger of oscillations, but that was the least of my worries. I could hardly drive in a straight line at the moment …
I didn’t have time to write any sonar obstacle avoidance code. I had a plan to read the distance data from the sonar and if an object got within 2 metres, add an offset in to the steering calculation to veer slightly left or right to miss the object. However, I hadn’t quite worked out how to tell if I had “passed” it to remove the offset, as I only had a forward facing sonar. The other option was to just stop the bot if an object appeared less than 20cm in front of the bot, stop, turn a few degrees, go forwards, then continue under GPS control… I’ll get round to adding this later …
I arrived in the US for a conference about a week before the competition and spent the evenings in the hotel writing the missing code. I wrote a basic file reader to load way points and basic config data from file, plus as my xBee worked for about 2m at best, I wrote a simple logging function, which meant I had some debug data after each test run to investigate. My waypoint algorithm was relatively simple;
- Calculate the heading and distance to the next way point
- Use the PID control to steer on that heading.
- If the distance to the way point was less than 2m meters, we’re very close. At this point these it a danger the bot will drive in circles, as the turning radius is greater that the heading it needs to hit the way point exactly. So, once we get close, I no change the steering to steer to the waypoint, instead, continue on the heading I was on just before we got close. You can assume the heading I was on would hit the waypoint pretty close. So, if I stay on that heading, and monitor the GPS vector to the waypoint, as I pass the way point I should see the GPS vector increase to 90 degrees as I pass by the waypoint. i.e. the vector will go from straight ahead, to 10, 20, 30, 45, eventually 90 degrees. At this point I’m within 2m meters and its 45 degrees or 90 degrees to my left or right, so, that’s a pretty good assumption of hitting the way point, so I assume I’ve passed it, and move on to the next way point.
- Once the bot has visited all the way point it has loaded, it stops. Course complete.

Way Point Diagram
I didn’t have time to write the obstacle avoidance code or tune the PID in time for the competition.
The day before the competition I spent the afternoon at the location planning the course and testing the code. I rewrote my magnetometer code again, this time using my own simple trigonometry rather than the library function. Plus I debugged the “hitting the way point” logic. By sunset, I’d navigated to a series of way points for the first time, but still careering off course occasionally. In addition I suddenly remembered that I hadn’t compensated for magnetic vs. true north, so added some Magnetic deviation code. This link has a great calculator for magnetic variance. It shows that Colorado has a deviation of about 8 degree, which would have been a big issue if I hadn’t remembered to compensate for it.
Other posts in this series :
